Adaptive Robotic Manipulator Simulation for Enhanced Feeding and Drinking Assistance
Abstract
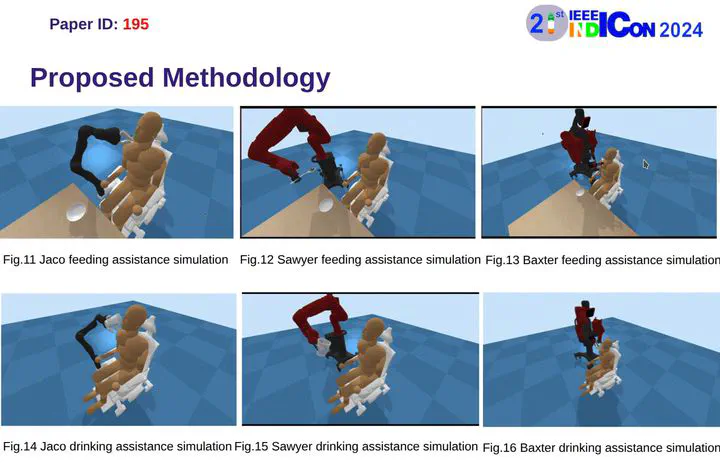
In the field of assistive technology, adaptive robotic manipulators offer a promising avenue for improving the standard of living for those who have impairments. This paper detailsa simulation study of an advanced robotic manipulator developed for feeding and drinking assistance. The simulation features a detailed model of three robotic arm outfitted with a specialized gripper and a spoon-like attachment, showcasing the robot’scapacity to adjust to various user requirements and environmental conditions. Key innovations include the robot’s real-time adaptation to user-specific feeding angles, precise control of liquid dispensing for drinking, and the creation of intuitive human-robot interaction protocols using reinforcement learning. The system’s performance is assessed within a simulated environment that includes a human model interacting with the robot at a dining setup, showing the robot’s ability to execute assistive actions with high precision and safety. Preliminary findings suggest that these robotic systems have significant potential to offer reliable and autonomous assistance, thereby enhancing independence and alleviating caregiver workload.
Type
Publication
In IEEE INDICON-24 conference
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software.
Create your slides in Markdown - click the Slides button to check out the example.
Add the publication’s full text or supplementary notes here. You can use rich formatting such as including code, math, and images.